22 KiB
Example Architecture — OpenStack Networking
This chapter provides an example architecture using OpenStack Networking, also known as the Neutron project, in a highly available environment.
Overview
A highly-available environment can be put into place if you require an environment that can scale horizontally, or want your cloud to continue to be operational in case of node failure. This example architecture has been written based on the current default feature set of OpenStack Havana, with an emphasis on high availability.
Components
| Component | Details |
|---|---|
| OpenStack release | Havana |
| Host operating system | Red Hat Enterprise Linux 6.5 |
| OpenStack package repository | Red Hat Distributed OpenStack (RDO) |
| Hypervisor | KVM |
| Database | MySQL |
| Message queue | Qpid |
| Networking service | OpenStack Networking |
| Tenant Network Separation | VLAN |
| Image service back end | GlusterFS |
| Identity driver | SQL |
| Block Storage back end | GlusterFS |
Rationale
This example architecture has been selected based on the current default feature set of OpenStack Havana, with an emphasis on high availability. This architecture is currently being deployed in an internal Red Hat OpenStack cloud and used to run hosted and shared services, which by their nature must be highly available.
This architecture's components have been selected for the following reasons:
- Red Hat Enterprise Linux
-
You must choose an operating system that can run on all of the physical nodes. This example architecture is based on Red Hat Enterprise Linux, which offers reliability, long-term support, certified testing, and is hardened. Enterprise customers, now moving into OpenStack usage, typically require these advantages.
- RDO
-
The Red Hat Distributed OpenStack package offers an easy way to download the most current OpenStack release that is built for the Red Hat Enterprise Linux platform.
- KVM
-
KVM is the supported hypervisor of choice for Red Hat Enterprise Linux (and included in distribution). It is feature complete and free from licensing charges and restrictions.
- MySQL
-
MySQL is used as the database back end for all databases in the OpenStack environment. MySQL is the supported database of choice for Red Hat Enterprise Linux (and included in distribution); the database is open source, scalable, and handles memory well.
- Qpid
-
Apache Qpid offers 100 percent compatibility with the
Advanced Message Queuing Protocol (AMQP)Standard, and its broker is available for both C++ and Java. - OpenStack Networking
-
OpenStack Networking offers sophisticated networking functionality, including Layer 2 (L2) network segregation and provider networks.
- VLAN
-
Using a virtual local area network offers broadcast control, security, and physical layer transparency. If needed, use VXLAN to extend your address space.
- GlusterFS
-
GlusterFS offers scalable storage. As your environment grows, you can continue to add more storage nodes (instead of being restricted, for example, by an expensive storage array).
Detailed Description
Node types
This section gives you a breakdown of the different nodes that make
up the OpenStack environment. A node is a physical machine that is
provisioned with an operating system, and running a defined software
stack on top of it. table_node_types provides node descriptions and
specifications.
| Type | Description | Example hardware |
|---|---|---|
Controller |
Controller nodes are responsible for running the management software services needed for the OpenStack environment to function. These nodes:
See |
Model: Dell R620 CPU: 2x Intel® Xeon® CPU E5-2620 0 @ 2.00 GHz Memory: 32 GB Disk: two 300 GB 10000 RPM SAS Disks Network: two 10G network ports |
Compute |
Compute nodes run the virtual machine instances in OpenStack. They:
See |
Model: Dell R620 CPU: 2x Intel® Xeon® CPU E5-2650 0 @ 2.00 GHz Memory: 128 GB Disk: two 600 GB 10000 RPM SAS Disks Network: four 10G network ports (For future proofing expansion) |
Storage |
Storage nodes store all the data required for the environment, including disk images in the Image service library, and the persistent storage volumes created by the Block Storage service. Storage nodes use GlusterFS technology to keep the data highly available and scalable. See |
Model: Dell R720xd CPU: 2x Intel® Xeon® CPU E5-2620 0 @ 2.00 GHz Memory: 64 GB Disk: two 500 GB 7200 RPM SAS Disks and twenty-four 600 GB 10000 RPM SAS Disks Raid Controller: PERC H710P Integrated RAID Controller, 1 GB NV Cache Network: two 10G network ports |
Network |
Network nodes are responsible for doing all the virtual networking needed for people to create public or private networks and uplink their virtual machines into external networks. Network nodes:
See |
Model: Dell R620 CPU: 1x Intel® Xeon® CPU E5-2620 0 @ 2.00 GHz Memory: 32 GB Disk: two 300 GB 10000 RPM SAS Disks Network: five 10G network ports |
Utility |
Utility nodes are used by internal administration staff only to provide a number of basic system administration functions needed to get the environment up and running and to maintain the hardware, OS, and software on which it runs. These nodes run services such as provisioning, configuration management, monitoring, or GlusterFS management software. They are not required to scale, although these machines are usually backed up. |
Model: Dell R620 CPU: 2x Intel® Xeon® CPU E5-2620 0 @ 2.00 GHz Memory: 32 GB Disk: two 500 GB 7200 RPM SAS Disks Network: two 10G network ports |
Networking layout
The network contains all the management devices for all hardware in the environment (for example, by including Dell iDrac7 devices for the hardware nodes, and management interfaces for network switches). The network is accessed by internal staff only when diagnosing or recovering a hardware issue.
OpenStack internal network
This network is used for OpenStack management functions and traffic,
including services needed for the provisioning of physical nodes
(pxe, tftp, kickstart), traffic
between various OpenStack node types using OpenStack APIs and messages
(for example, nova-compute talking to keystone
or cinder-volume talking to nova-api), and all
traffic for storage data to the storage layer underneath by the Gluster
protocol. All physical nodes have at least one network interface
(typically eth0) in this network. This network is only
accessible from other VLANs on port 22 (for ssh access to
manage machines).
Public Network
This network is a combination of:
- IP addresses for public-facing interfaces on the controller nodes (which end users will access the OpenStack services)
- A range of publicly routable, IPv4 network addresses to be used by OpenStack Networking for floating IPs. You may be restricted in your access to IPv4 addresses; a large range of IPv4 addresses is not necessary.
- Routers for private networks created within OpenStack.
This network is connected to the controller nodes so users can access the OpenStack interfaces, and connected to the network nodes to provide VMs with publicly routable traffic functionality. The network is also connected to the utility machines so that any utility services that need to be made public (such as system monitoring) can be accessed.
VM traffic network
This is a closed network that is not publicly routable and is simply used as a private, internal network for traffic between virtual machines in OpenStack, and between the virtual machines and the network nodes that provide l3 routes out to the public network (and floating IPs for connections back in to the VMs). Because this is a closed network, we are using a different address space to the others to clearly define the separation. Only Compute and OpenStack Networking nodes need to be connected to this network.
Node connectivity
The following section details how the nodes are connected to the
different networks (see networking_layout) and what other considerations need
to take place (for example, bonding) when connecting nodes to the
networks.
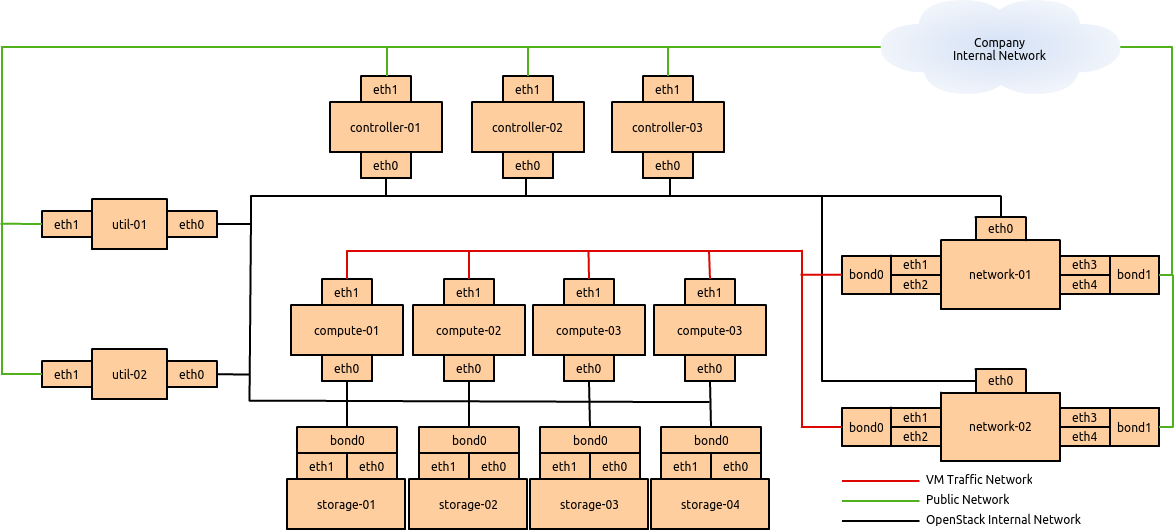
Initial deployment
Initially, the connection setup should revolve around keeping the
connectivity simple and straightforward in order to minimize deployment
complexity and time to deploy. The deployment shown in figure_basic_node_deployment
aims to have 1 × 10G connectivity available to all compute nodes, while
still leveraging bonding on appropriate nodes for maximum
performance.
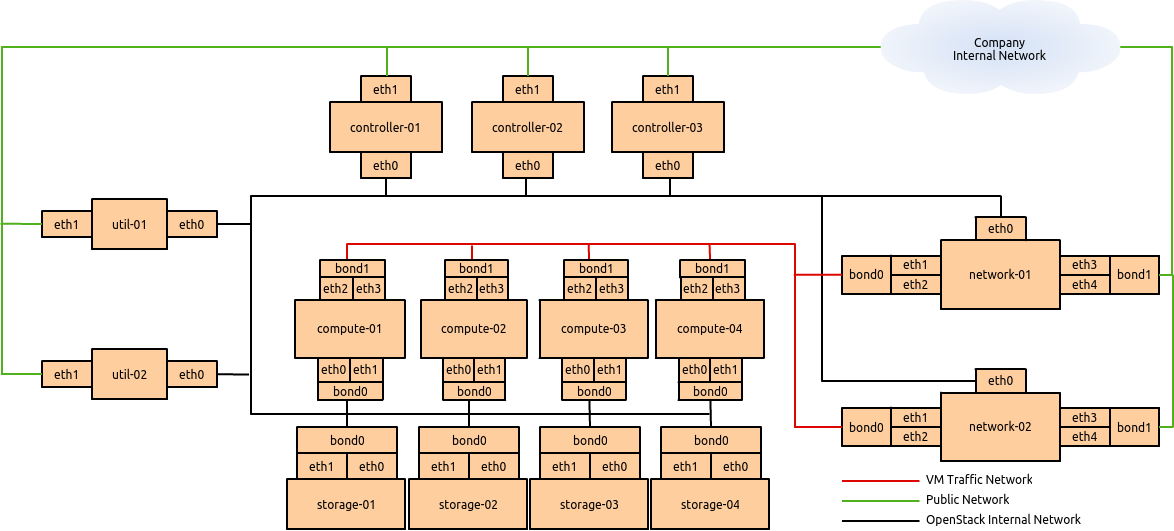
Connectivity for maximum performance
If the networking performance of the basic layout is not enough, you
can move to figure_performance_node_deployment, which provides 2 ×
10G network links to all instances in the environment as well as
providing more network bandwidth to the storage layer.
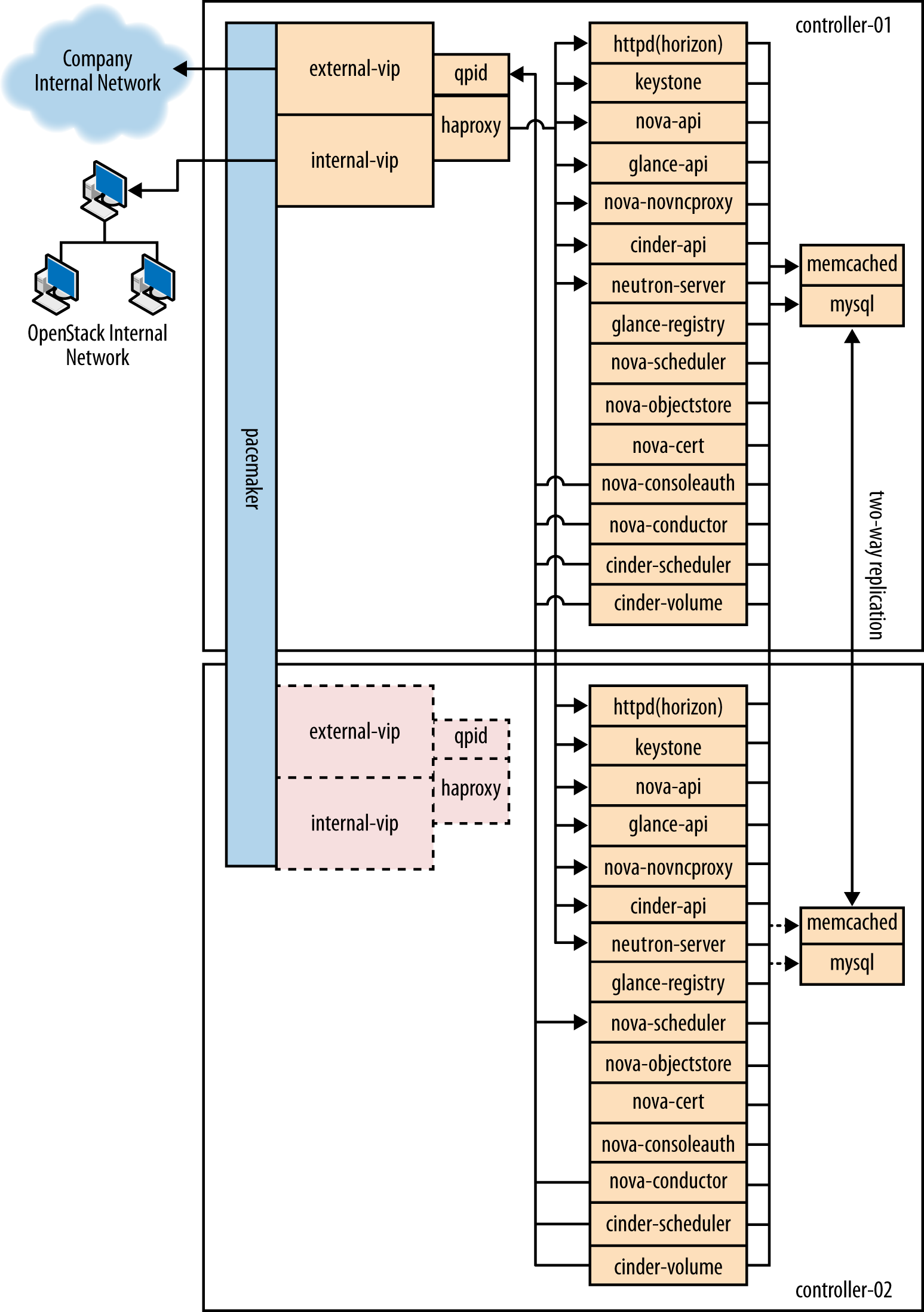
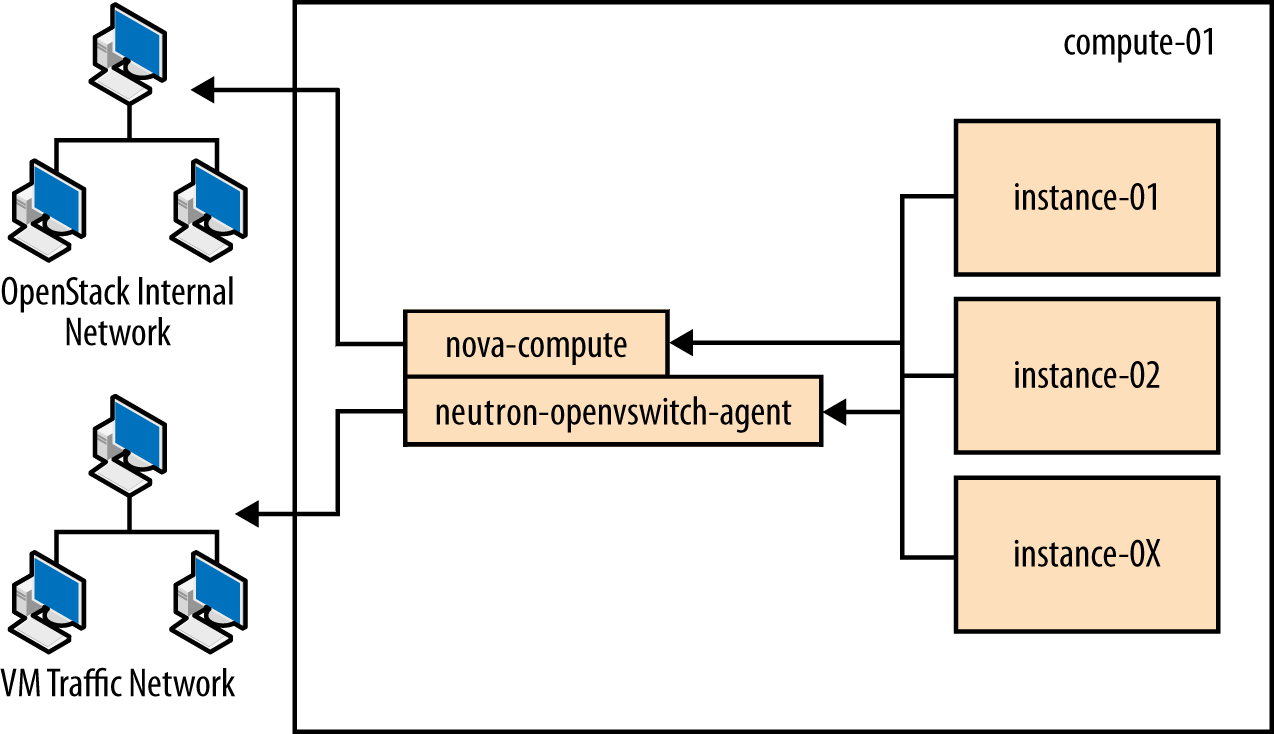
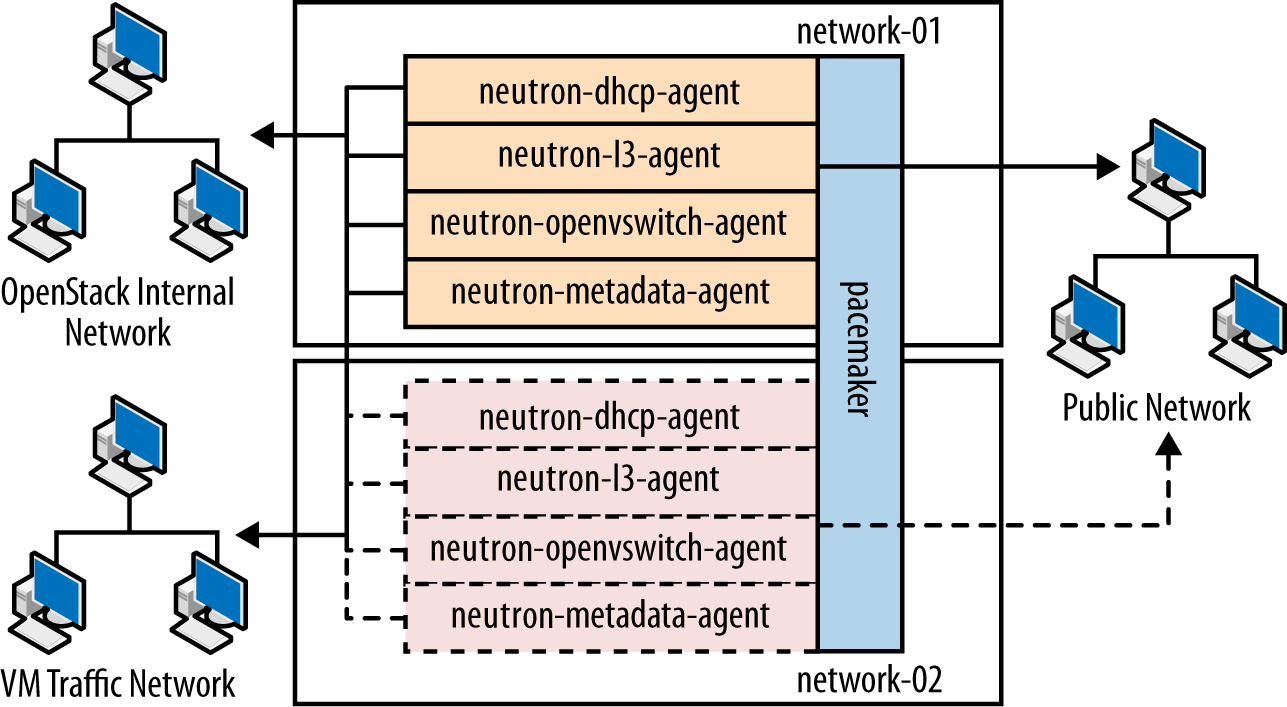
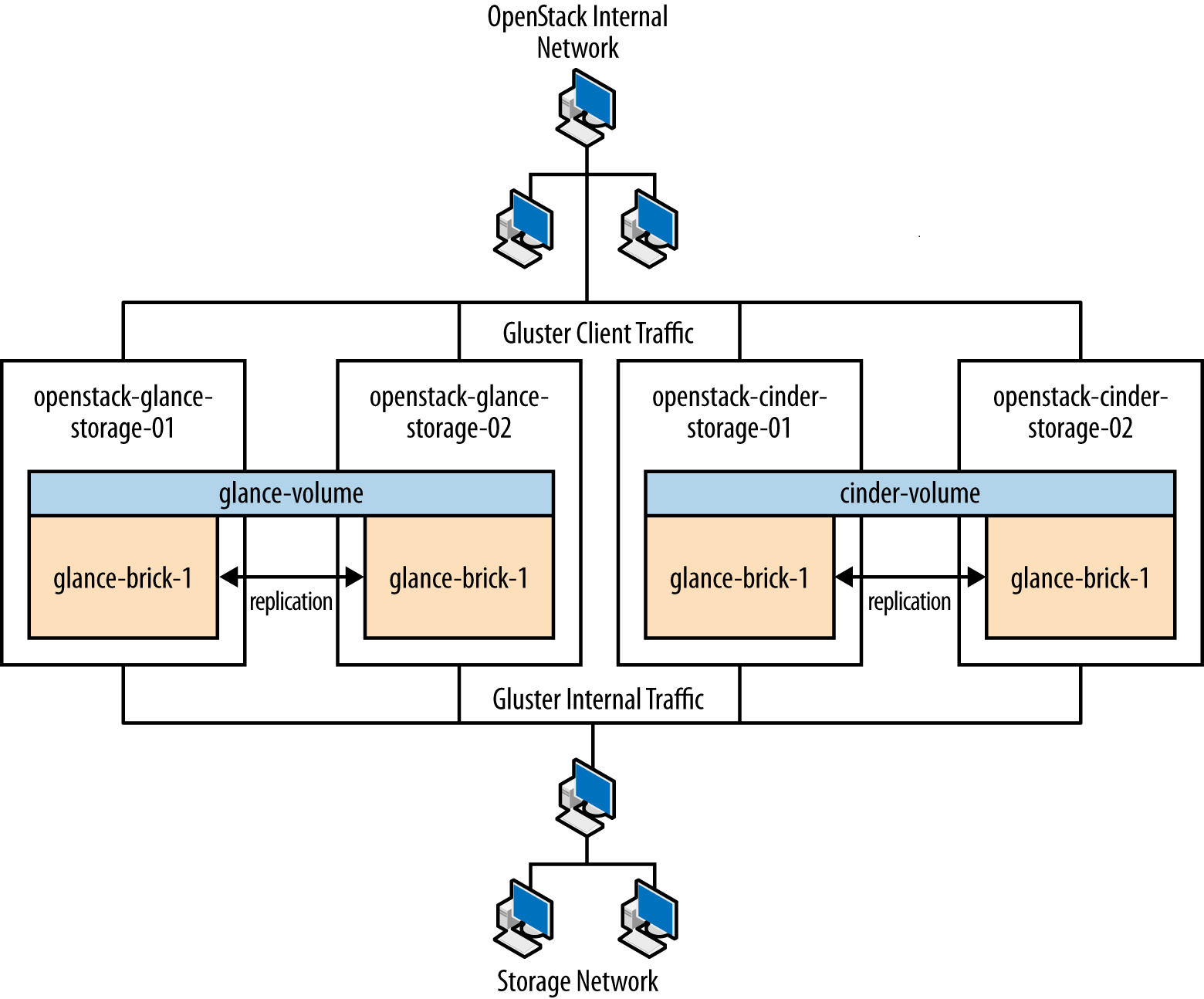
Node diagrams
The following diagrams, controller_node through storage_node, include logical information about the
different types of nodes, indicating what services will be running on
top of them and how they interact with each other. The diagrams also
illustrate how the availability and scalability of services are
achieved.
Example Component Configuration
third_party_component_configuration and openstack_component_configuration include example
configuration and considerations for both third-party and OpenStack
components:
| Component | Tuning | Availability | Scalability |
|---|---|---|---|
| MySQL | binlog-format = row |
Master/master replication. However, both nodes are not used at the same time. Replication keeps all nodes as close to being up to date as possible (although the asynchronous nature of the replication means a fully consistent state is not possible). Connections to the database only happen through a Pacemaker virtual IP, ensuring that most problems that occur with master-master replication can be avoided. | Not heavily considered. Once load on the MySQL server increases enough that scalability needs to be considered, multiple masters or a master/slave setup can be used. |
| Qpid | max-connections=1000 worker-threads=20
connection-backlog=10, sasl security enabled with
SASL-BASIC authentication |
Qpid is added as a resource to the Pacemaker software that runs on Controller nodes where Qpid is situated. This ensures only one Qpid instance is running at one time, and the node with the Pacemaker virtual IP will always be the node running Qpid. | Not heavily considered. However, Qpid can be changed to run on all controller nodes for scalability and availability purposes, and removed from Pacemaker. |
| HAProxy | maxconn 3000 |
HAProxy is a software layer-7 load balancer used to front door all clustered OpenStack API components and do SSL termination. HAProxy can be added as a resource to the Pacemaker software that runs on the Controller nodes where HAProxy is situated. This ensures that only one HAProxy instance is running at one time, and the node with the Pacemaker virtual IP will always be the node running HAProxy. | Not considered. HAProxy has small enough performance overheads that
a single instance should scale enough for this level of workload. If
extra scalability is needed, keepalived or other Layer-4
load balancing can be introduced to be placed in front of multiple
copies of HAProxy. |
| Memcached | MAXCONN="8192" CACHESIZE="30457" |
Memcached is a fast in-memory key-value cache software that is used by OpenStack components for caching data and increasing performance. Memcached runs on all controller nodes, ensuring that should one go down, another instance of Memcached is available. | Not considered. A single instance of Memcached should be able to
scale to the desired workloads. If scalability is desired, HAProxy can
be placed in front of Memcached (in raw tcp mode) to
utilize multiple Memcached instances for scalability. However, this
might cause cache consistency issues. |
| Pacemaker | Configured to use corosync and cman as a
cluster communication stack/quorum manager, and as a two-node
cluster. |
Pacemaker is the clustering software used to ensure the availability
of services running on the controller and network nodes:
|
If more nodes need to be made cluster aware, Pacemaker can scale to 64 nodes. |
| GlusterFS | glusterfs performance profile "virt" enabled on all
volumes. Volumes are setup in two-node replication. |
Glusterfs is a clustered file system that is run on the storage
nodes to provide persistent scalable data storage in the environment.
Because all connections to gluster use the gluster native
mount points, the gluster instances themselves provide
availability and failover functionality. |
The scalability of GlusterFS storage can be achieved by adding in more storage volumes. |
| Component | Node type | Tuning | Availability | Scalability |
|---|---|---|---|---|
| Dashboard (horizon) | Controller | Configured to use Memcached as a session store, neutron
support is enabled, can_set_mount_point = False |
The dashboard is run on all controller nodes, ensuring at least one instance will be available in case of node failure. It also sits behind HAProxy, which detects when the software fails and routes requests around the failing instance. | The dashboard is run on all controller nodes, so scalability can be achieved with additional controller nodes. HAProxy allows scalability for the dashboard as more nodes are added. |
| Identity (keystone) | Controller | Configured to use Memcached for caching and PKI for tokens. | Identity is run on all controller nodes, ensuring at least one instance will be available in case of node failure. Identity also sits behind HAProxy, which detects when the software fails and routes requests around the failing instance. | Identity is run on all controller nodes, so scalability can be achieved with additional controller nodes. HAProxy allows scalability for Identity as more nodes are added. |
| Image service (glance) | Controller | /var/lib/glance/images is a GlusterFS native mount to a
Gluster volume off the storage layer. |
The Image service is run on all controller nodes, ensuring at least one instance will be available in case of node failure. It also sits behind HAProxy, which detects when the software fails and routes requests around the failing instance. | The Image service is run on all controller nodes, so scalability can be achieved with additional controller nodes. HAProxy allows scalability for the Image service as more nodes are added. |
Compute (nova) |
Controller, Compute |
Configured to use Qpid, Configured |
The nova API, scheduler, objectstore, cert, consoleauth, conductor, and vncproxy services are run on all controller nodes, ensuring at least one instance will be available in case of node failure. Compute is also behind HAProxy, which detects when the software fails and routes requests around the failing instance. Nova-compute and nova-conductor services, which run on the compute nodes, are only needed to run services on that node, so availability of those services is coupled tightly to the nodes that are available. As long as a compute node is up, it will have the needed services running on top of it. |
The nova API, scheduler, objectstore, cert, consoleauth, conductor, and vncproxy services are run on all controller nodes, so scalability can be achieved with additional controller nodes. HAProxy allows scalability for Compute as more nodes are added. The scalability of services running on the compute nodes (compute, conductor) is achieved linearly by adding in more compute nodes. |
| Block Storage (cinder) | Controller | Configured to use Qpid, qpid_heartbeat =10``,configured
to use a Gluster volume from the storage layer as the back end for Block
Storage, using the Gluster native client. |
Block Storage API, scheduler, and volume services are run on all controller nodes, ensuring at least one instance will be available in case of node failure. Block Storage also sits behind HAProxy, which detects if the software fails and routes requests around the failing instance. | Block Storage API, scheduler and volume services are run on all controller nodes, so scalability can be achieved with additional controller nodes. HAProxy allows scalability for Block Storage as more nodes are added. |
| OpenStack Networking (neutron) | Controller, Compute, Network | Configured to use QPID, qpid_heartbeat = 10, kernel
namespace support enabled, tenant_network_type = vlan,
allow_overlapping_ips = true,
tenant_network_type = vlan,
bridge_uplinks = br-ex:em2,
bridge_mappings = physnet1:br-ex |
The OpenStack Networking service is run on all controller nodes, ensuring at least one instance will be available in case of node failure. It also sits behind HAProxy, which detects if the software fails and routes requests around the failing instance. | The OpenStack Networking server service is run on all controller
nodes, so scalability can be achieved with additional controller nodes.
HAProxy allows scalability for OpenStack Networking as more nodes are
added. Scalability of services running on the network nodes is not
currently supported by OpenStack Networking, so they are not be
considered. One copy of the services should be sufficient to handle the
workload. Scalability of the ovs-agent running on compute
nodes is achieved by adding in more compute nodes as necessary. |